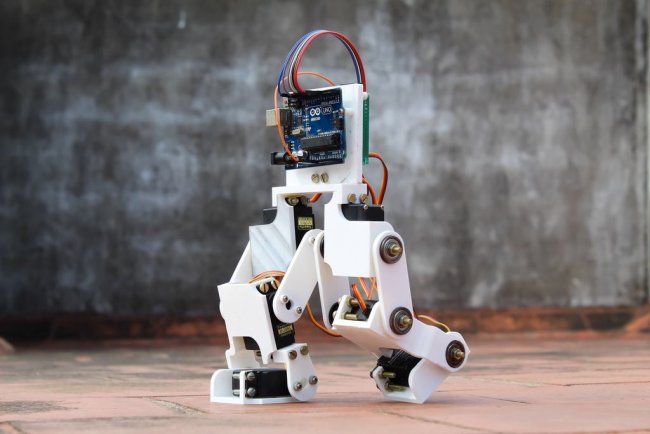
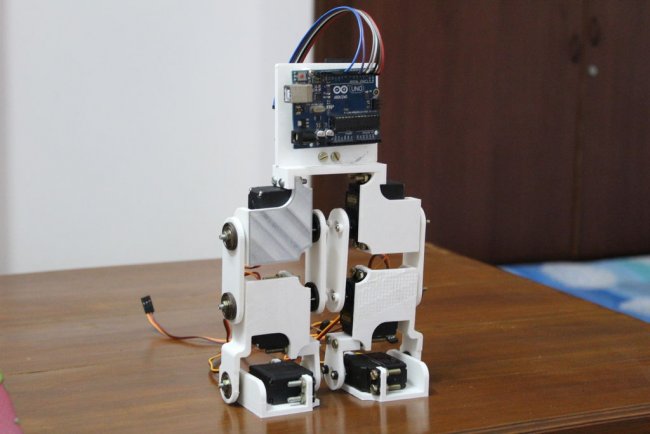
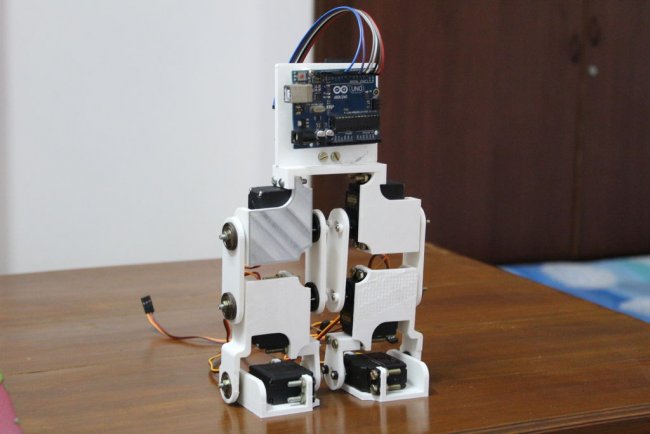
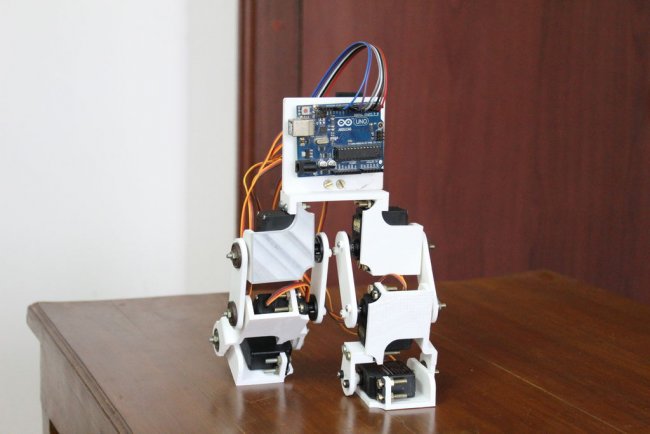
Мастер увлекается робототехникой и при изготовлении данной самоделки мастер преследовал цель сымитировать движение человека при ходьбе и беге. При этом устройство должно быть надежным и недорогим.
Давайте посмотрим небольшое видео.
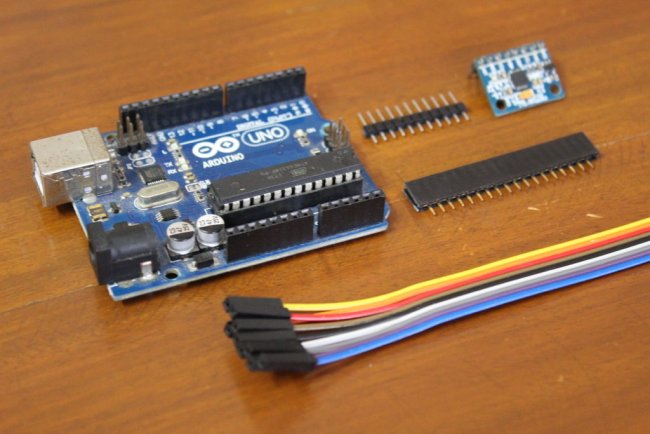
Инструменты и материалы:
-Arduino Uno;
-Серводвигатель Towerpro MG995 — 6 шт;
-Макетная плата;
-Разъемы — 20 шт;
-Перемычки -10 штук;
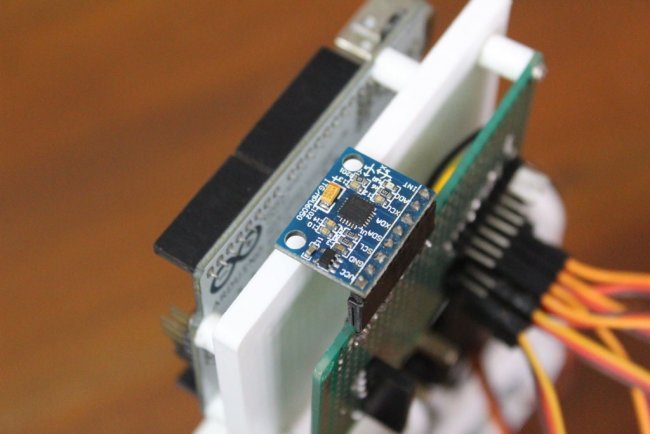
-Модуль MPU6050 IMU (опция);
-Ультразвуковой датчик (опция);
-Подшипник для скейтборда (8x22x7 мм);
-Гайки и болты М4 ;
-3D-принтер;




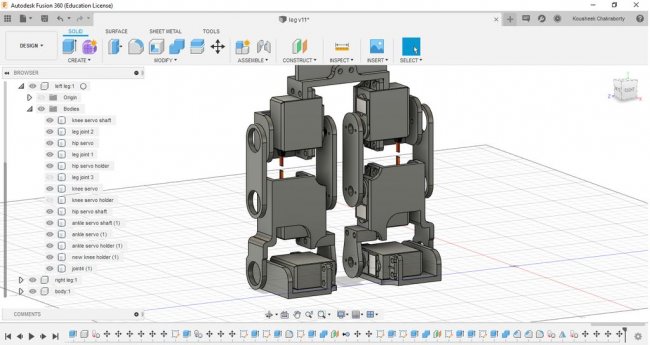
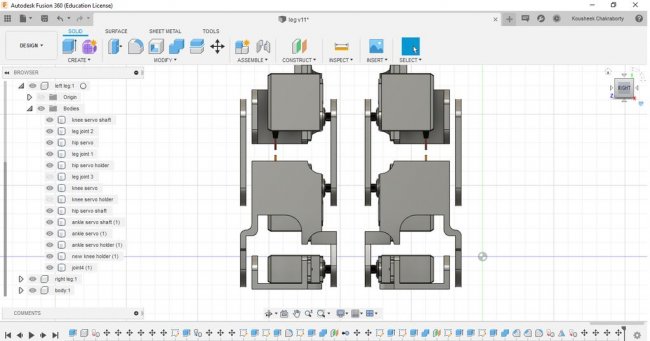
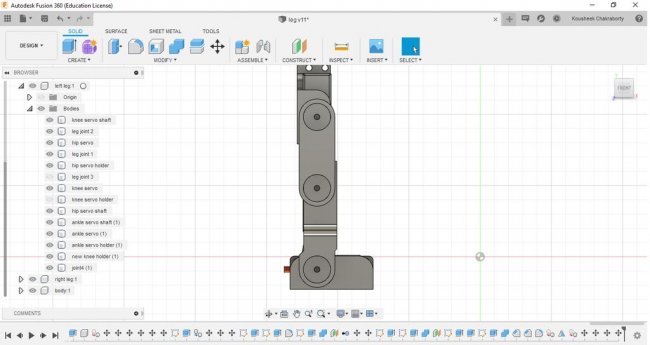
Шаг первый: проектирование
Робот был разработан в Fusion 360. Сначала мастер импортировал серводвигатели и уже вокруг них проектировал все остальные детали.
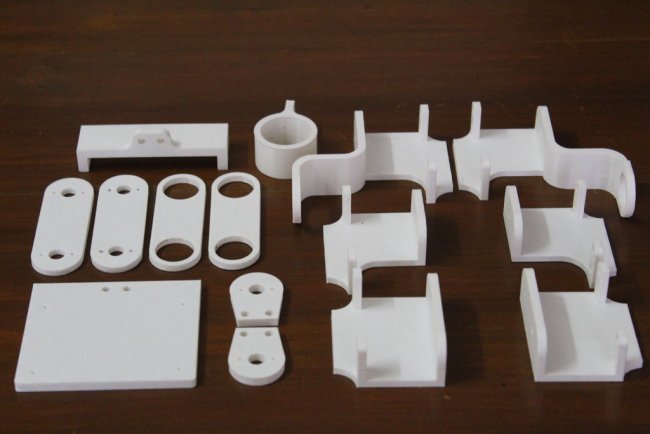
Шаг второй: 3D-печать
Детали были напечатаны PLA с заполнением 40%, соплом 0,4 мм и высотой слоя 0,1мм.
Файл для печати можно скачать ниже.
stls.rar.
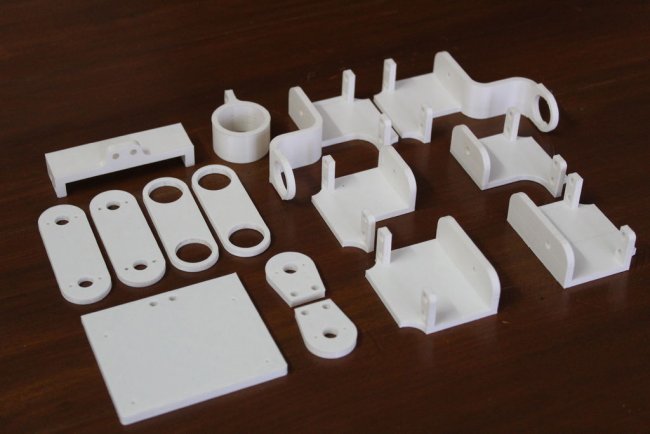

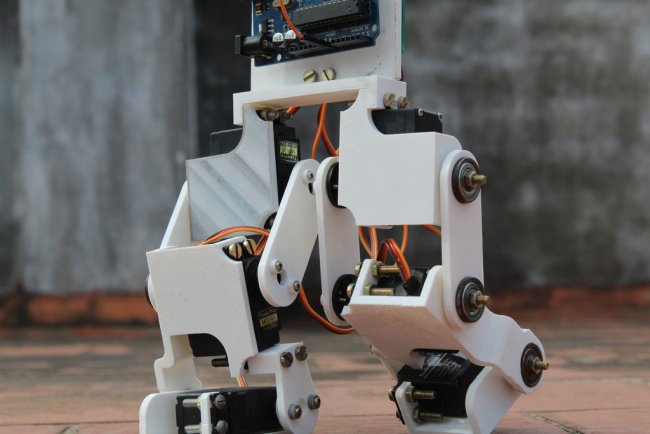
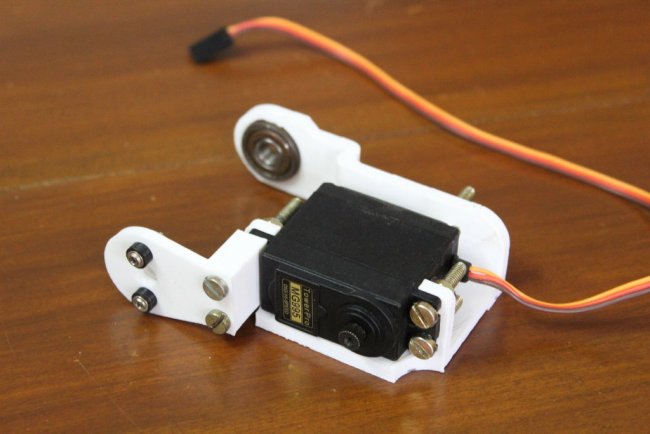
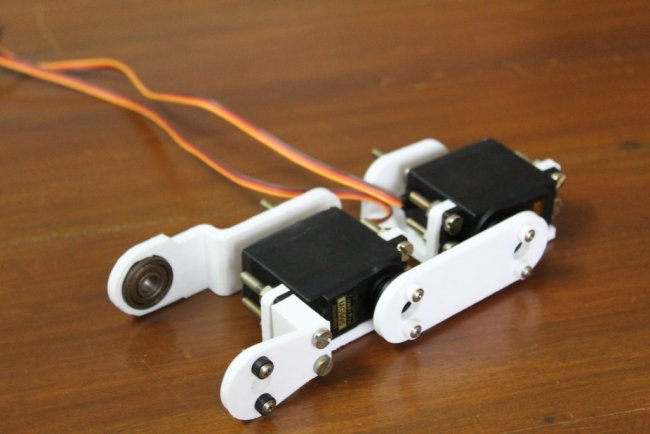
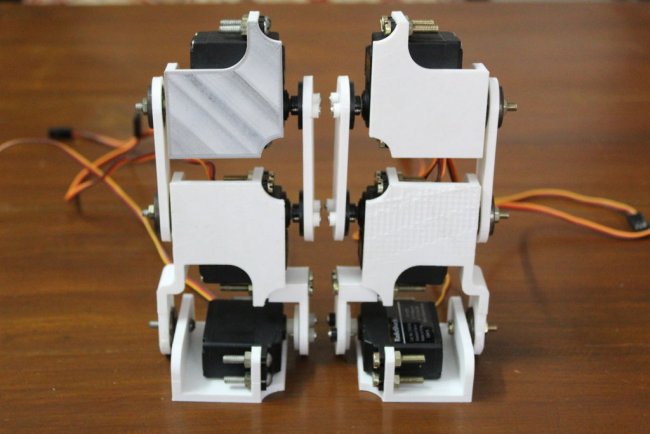
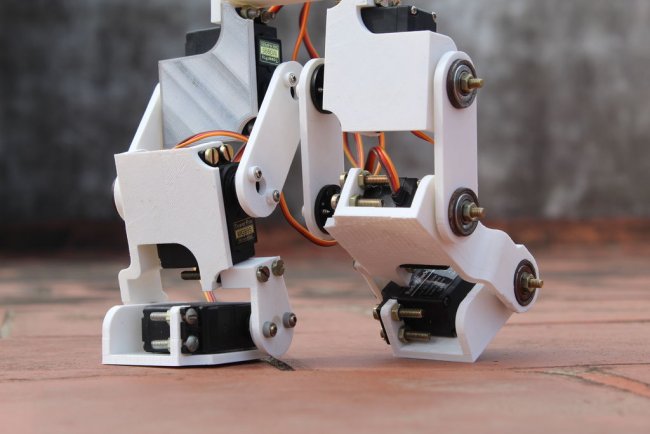
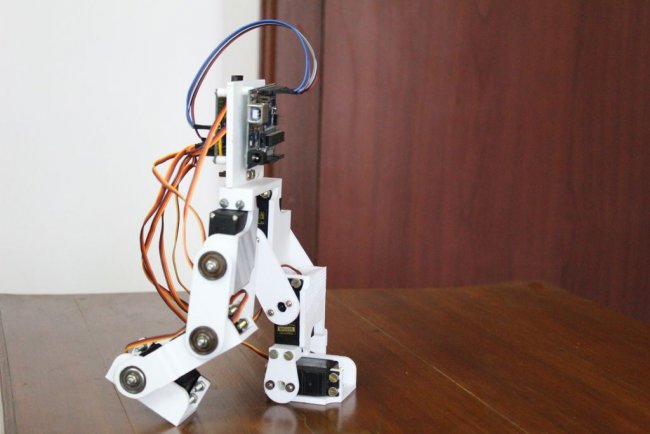
Шаг третий: ноги
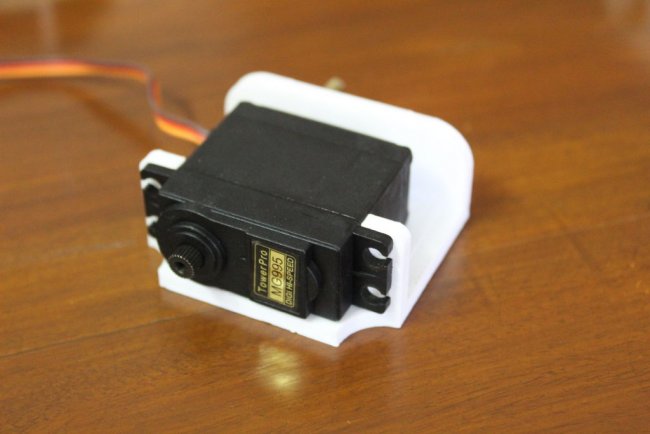
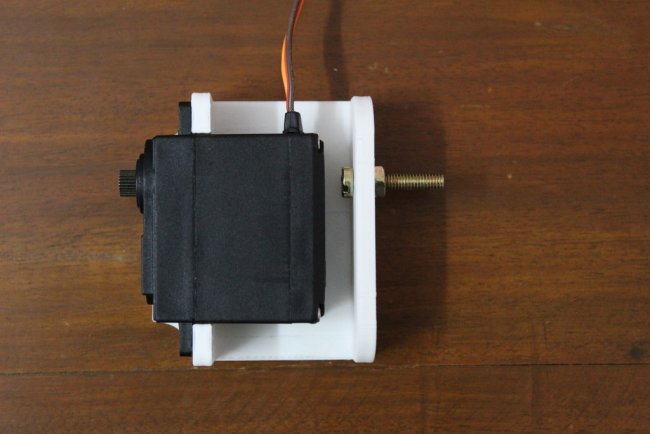
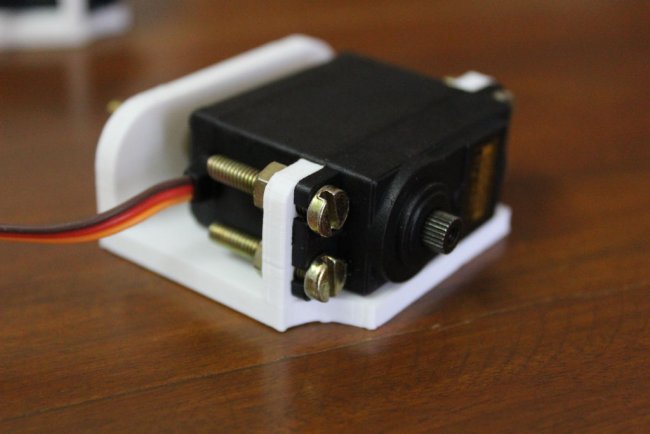
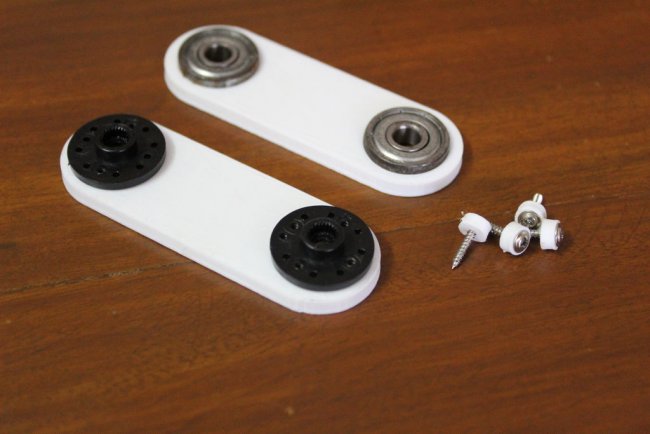
После печати деталей мастер начинает сборку ног. Устанавливает подшипник в коленный сустав. Закрепляет сервопривод. Вторую ногу собирает аналогично первой.

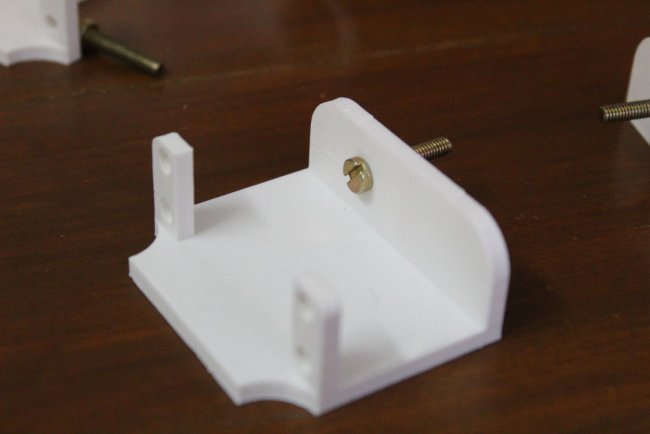
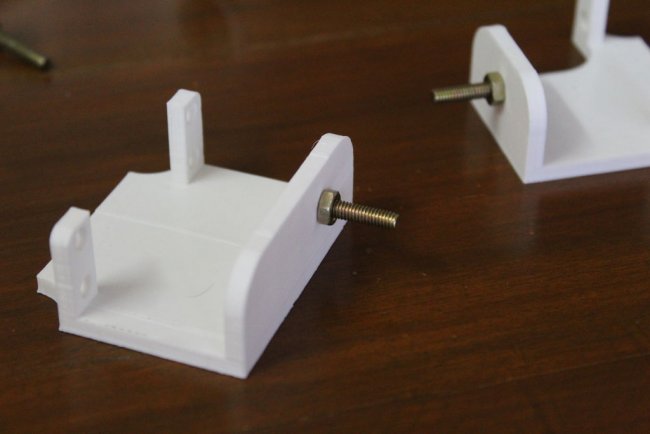
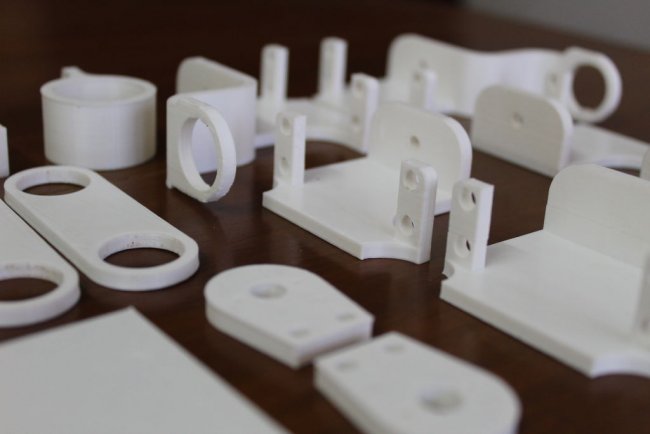
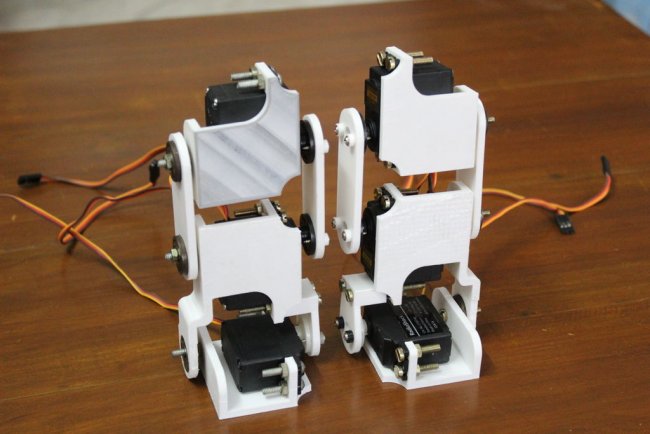
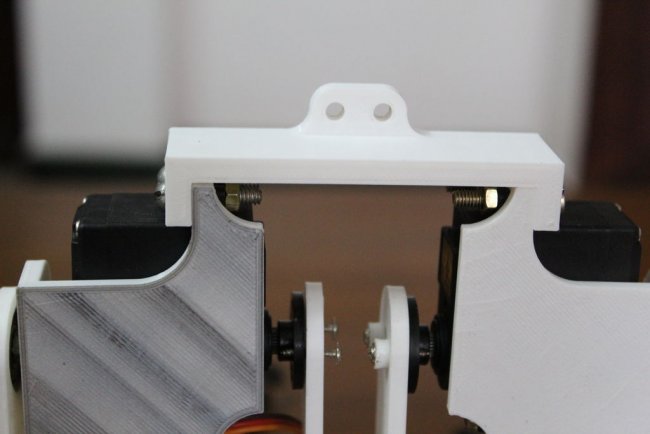
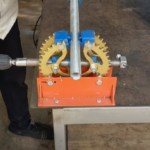
Шаг четвертый: соединительные скобы
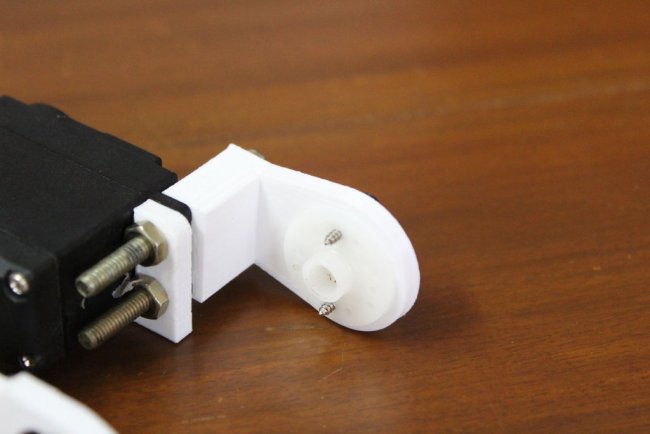
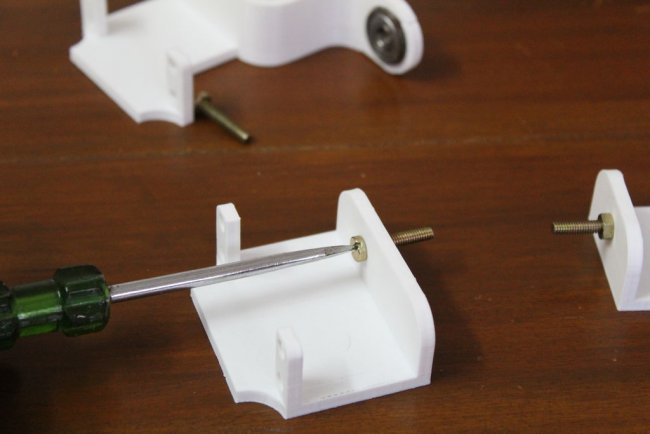
Подготавливает скобы. Скобы соединяют ноги и туловище. Устанавливаются скобы с двух сторон. В одну пару скоб устанавливаются подшипники, в другую устанавливает шкив, который будет устанавливаться на вал сервопривода.





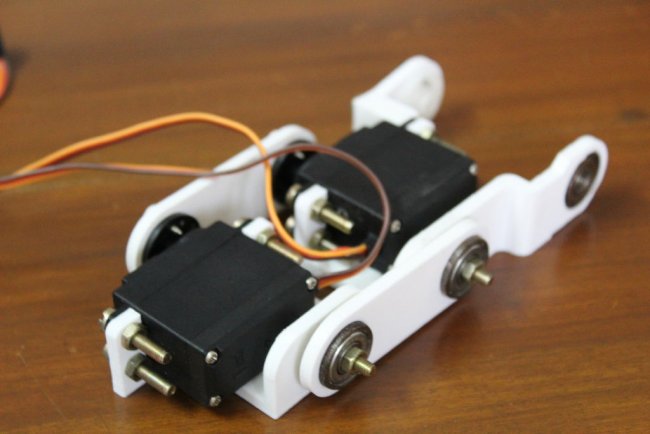
Шаг пятый: сборка узла ног
Дальше объединяет две ноги в один узел.

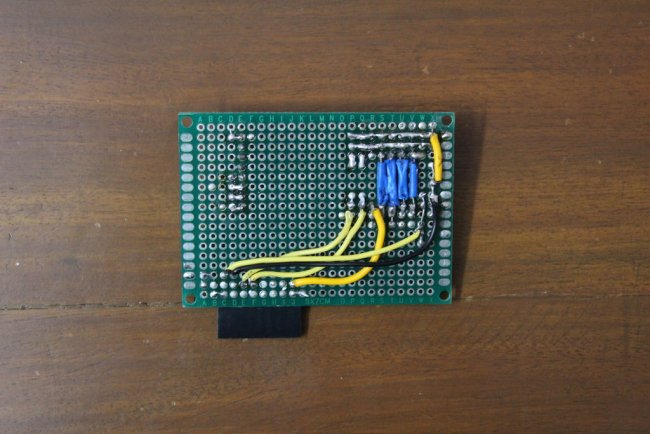
Шаг шестой: плата и подключение
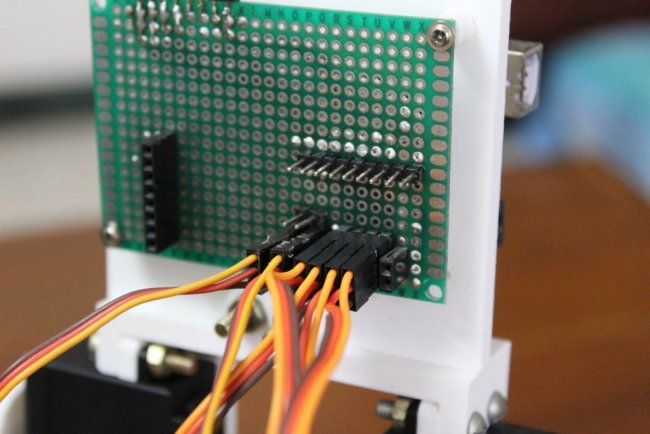
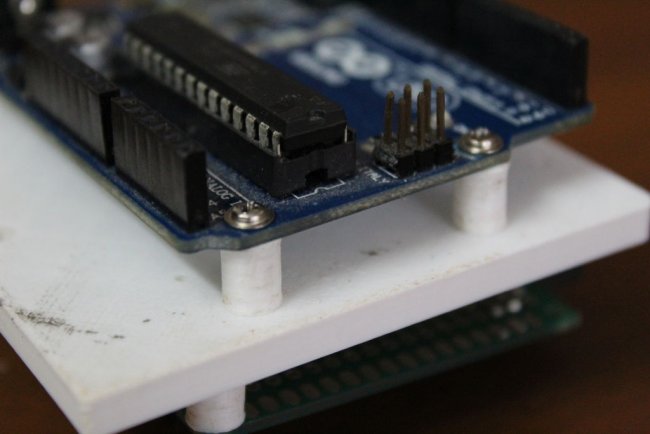
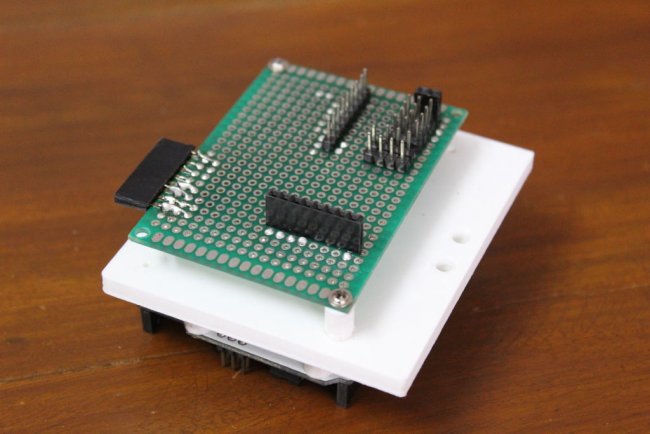
Это необязательный шаг. Чтобы сделать проводку более аккуратной, мастер решил изготовить плату. Плата содержит порты для прямого подключения проводов серводвигателя. Кроме того, были установлены дополнительные порты на случай установки других датчиков. Плата также имеет порт для подключения внешнего источника питания, необходимый для питания серводвигателей. Перемычка используется для переключения между USB и внешним питанием для Arduino.
Примечание: обязательно удалите перемычку перед подключением Arduino к компьютеру через USB. Невыполнение этого может привести к повреждению Arduino.
Подключение сервоприводов к Ардуино в следующем порядке:
Левое бедро >> контакт 9
Правое бедро >> контакт 8
Левое колено >> контакт 7
Правое колено >> контакт 6
Левая нога >> контакт 5
Правая нога >> контакт 4

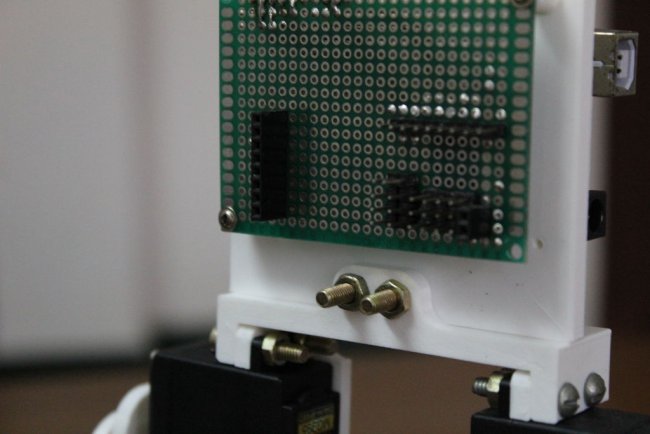

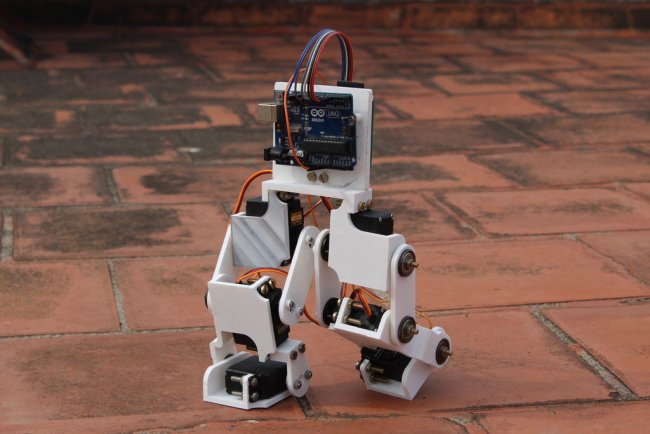
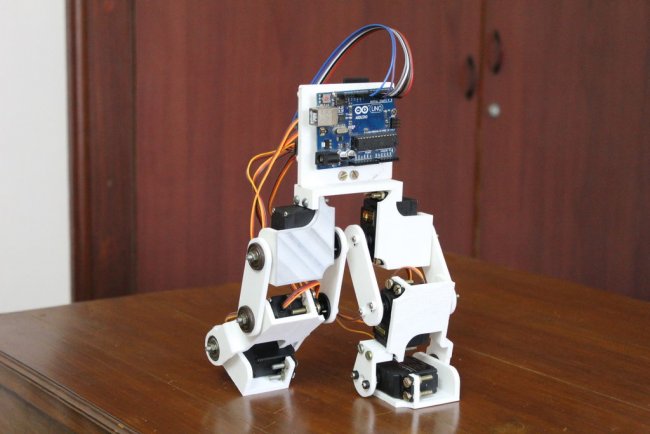
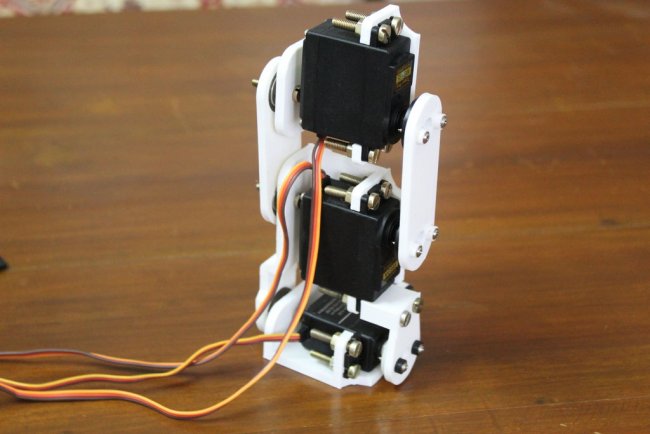
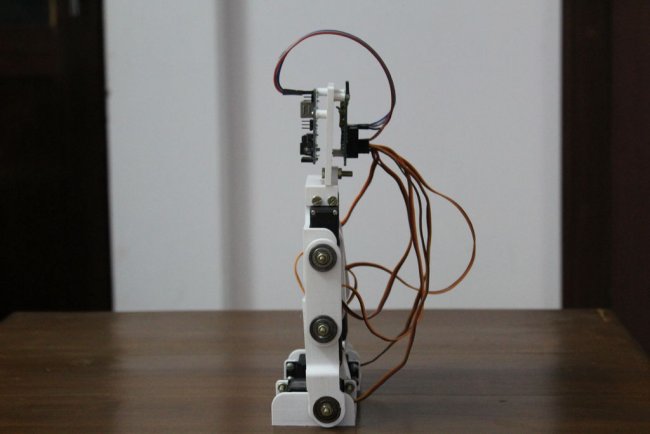
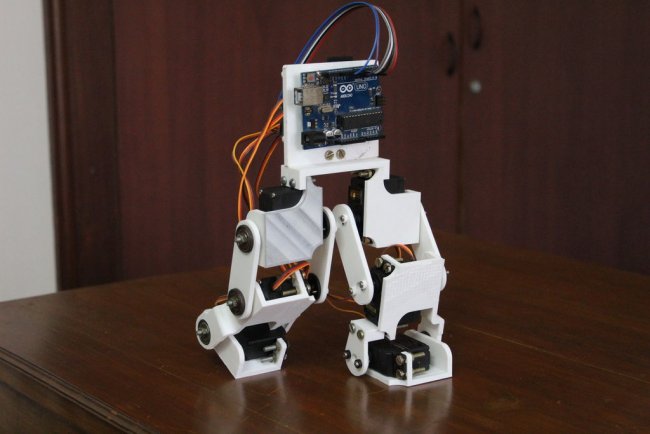
Шаг седьмой: установка туловища
Далее мастер закрепляет туловище к ногам.

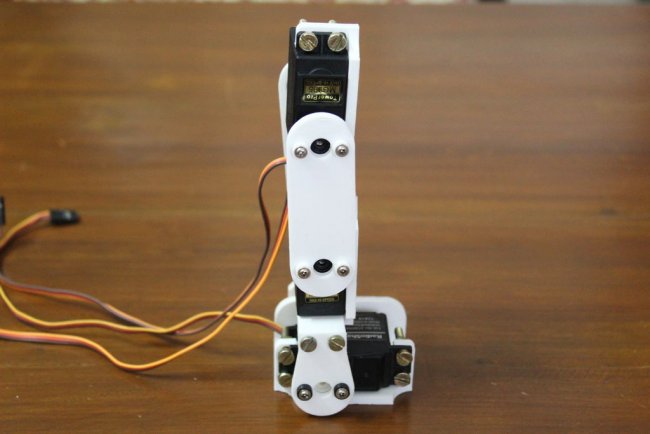
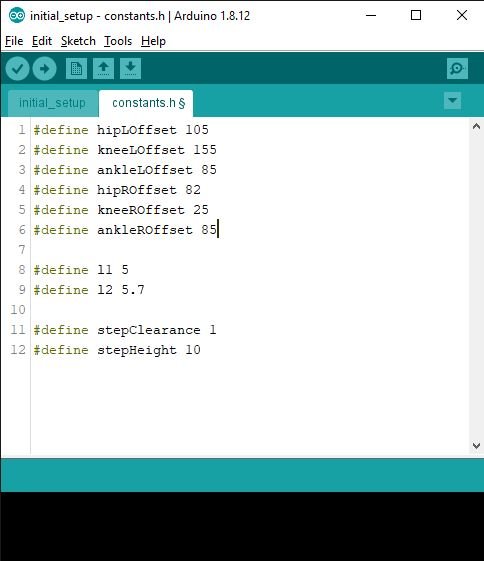
Шаг восьмой: настройка
Дальше нужно настроить сервоприводы. Мастер демонтирует с каждого сервопривода шкивы и загружает код initial_setup.rar
Дальше нужно все установить на место, но так, чтобы ноги были прямые, а подошвы параллельны поверхности.
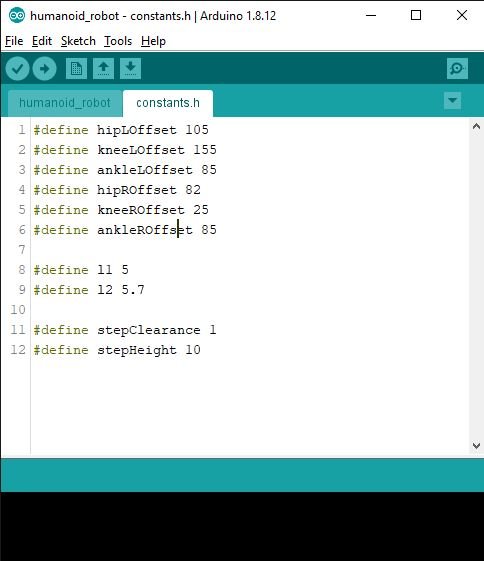
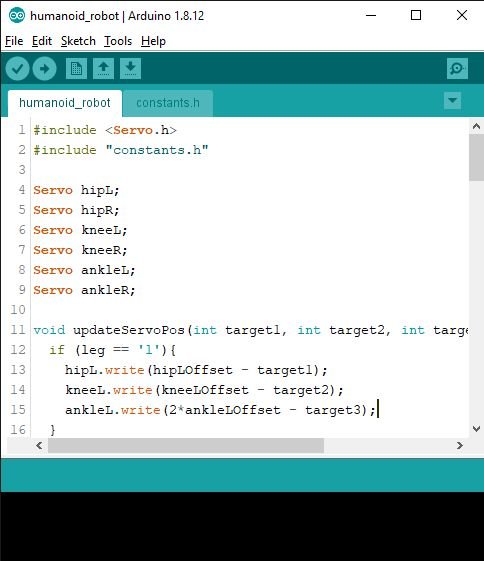
Шаг девятый: код
Чтобы заставить двуногого робота выполнять полезные действия, такие как бег и ходьба, различные движения должны быть запрограммированы в виде траекторий движения. Траектории движения — это путь, по которому движутся в данном случае ступни.
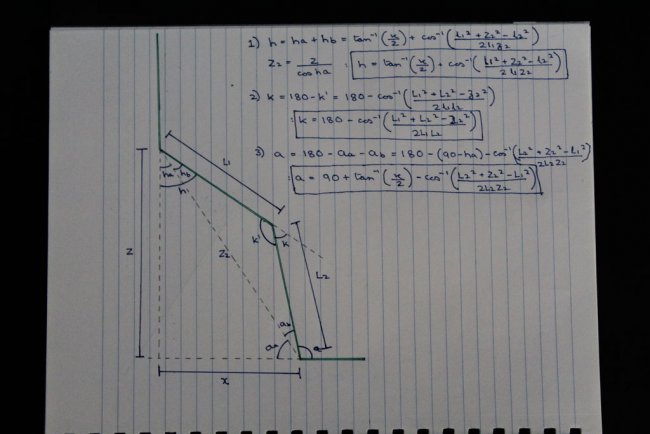
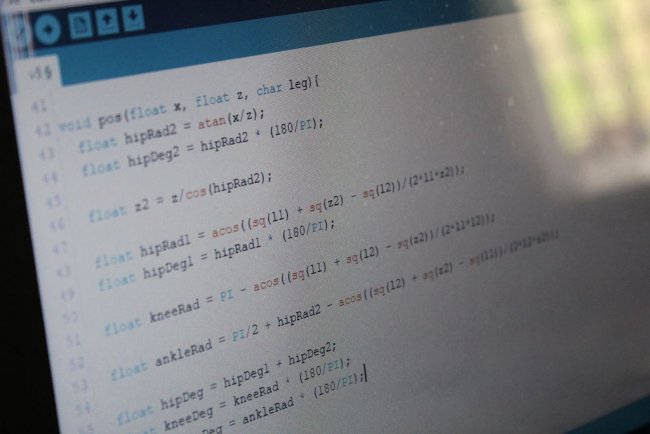
Мастер произвел все расчеты и написал код необходимы для движения робота.
humanoid_robot.rar
Все готово, осталось только подключить питание. Робот может совершать шаги длиной от 10 до 2 см без опрокидывания. Скорость можно программно регулировать. Этот двуногий робот, в сочетании с Arduino обеспечивает надежную платформу для экспериментов с различными другими движениями такими как прыжки или балансировка во время удара по мячу.

Источник (Source)
Источник: https://usamodelkina.ru/


Average Rating