

Цель этого проекта, создать устройство с удаленным управлением для дезинфекции территории, а также, в случае необходимости, с помощью него можно будет доставлять продукты, лекарства и другие вещи. Такое устройство снизит контакт больных людей со здоровыми и снизит распространение заболевания. Робот полностью управляется с помощью передатчика flyski и имеет камеру Wi-Fi для прямой трансляции видео.
Инструменты и материалы:
-Ардуино;
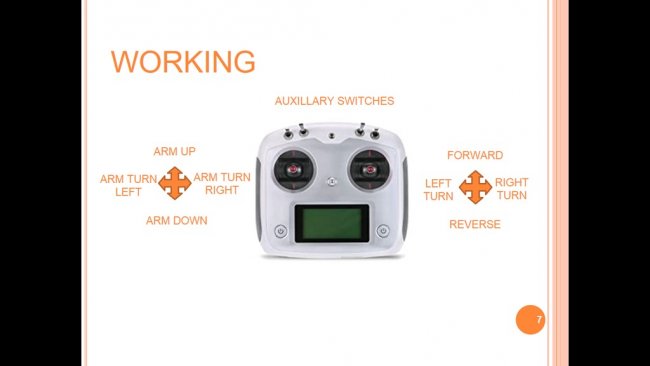
-10-канальный передатчик Flyski;
-Приемник FLYSKY FS-iA10 FSiA10B;
-Модуль драйвера шагового двигателя;
-Драйвер двигателя Cytron MDD10a;
-4-канальный релейный модуль;
-Драйвер двигателя LM298 ;
-Двигатели для электровелосипедов 24В 250Вт;
-Два аккумулятора;
-Стеклоочистители с мотором;
-Сельскохозяйственный опрыскиватель;
-Старый гусеничный робот;
-Металлический лист;
-Сварочное оборудование;
-Пластиковый контейнер;
Шаг первый: робот
В качестве донора мастер использует старого боевого робота (битва роботов). Робот на гусеничном ходу имеет два двигателя от электровелосипеда и проводное управление. Сначала мастер демонтировал проводку и боевое оборудование.


Затем установил металлическую пластину, сварил и установил батарейный отсек. Покрасил металлические детали.




Шаг второй: установка опрыскивателя
Опрыскиватель имеет емкость 16 литров и устанавливается за батарейным отсеком.

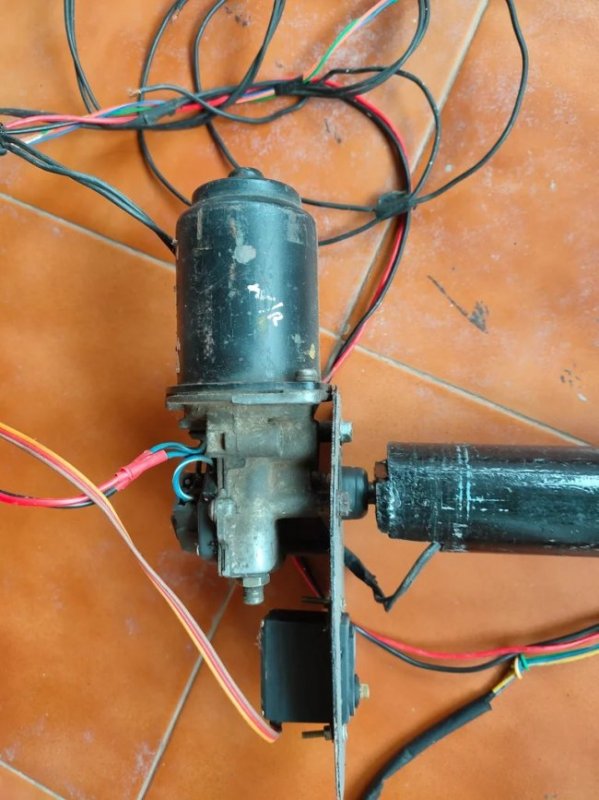
Дозатор крепится на металлическом рычаге. Для управления рычагом по вертикали и горизонтали мастер установил два старых двигателя от стеклоочистителя.



Шаг третий: контейнер
Пластиковый контейнер прикручен к верхней части батарейного отсека и предназначен для перевозки предметов первой необходимости для пациентов. Он легко снимается, и после каждого использования его легко почистить.



Шаг четвертый: электронная часть
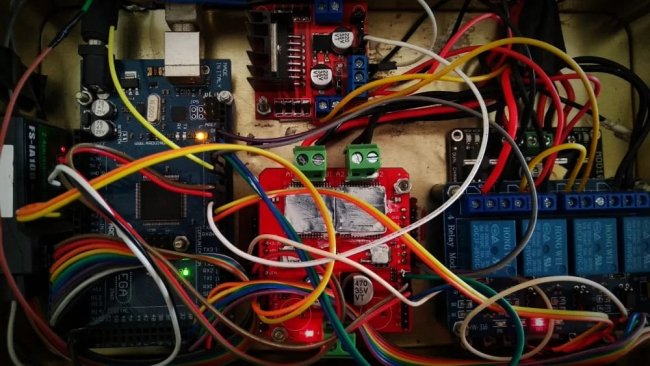
Что касается электроники, то приемник подключается к аналоговым выводам Arduino.
Один драйвер двигателя используется для управления двигателями электровелосипеда, второй для управления двигателями манипулятора. Впереди самоходной тележки устанавливается камера и два светодиодных фонаря.
Привод двигателя LM298 используется для управления мощностью опрыскивателя. Модуль 4-канального реле используется для включения устройства и дополнительных индикаторов.
Вот такое полезно устройство собрала группа студентов.



Источник (Source)
Источник: https://usamodelkina.ru/


Average Rating