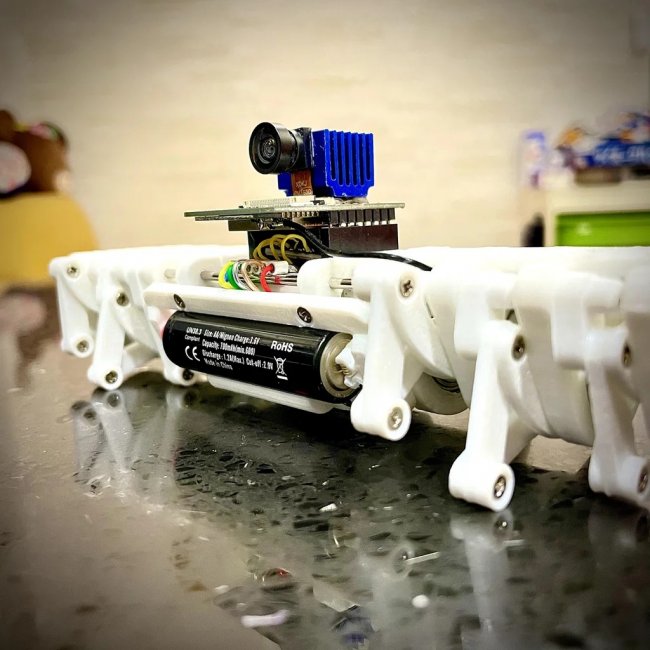

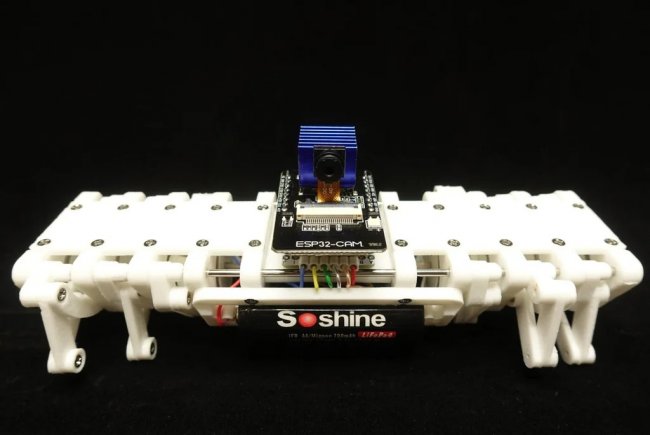
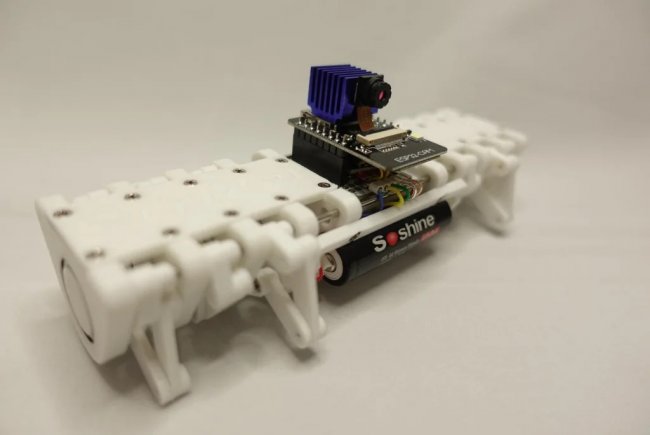
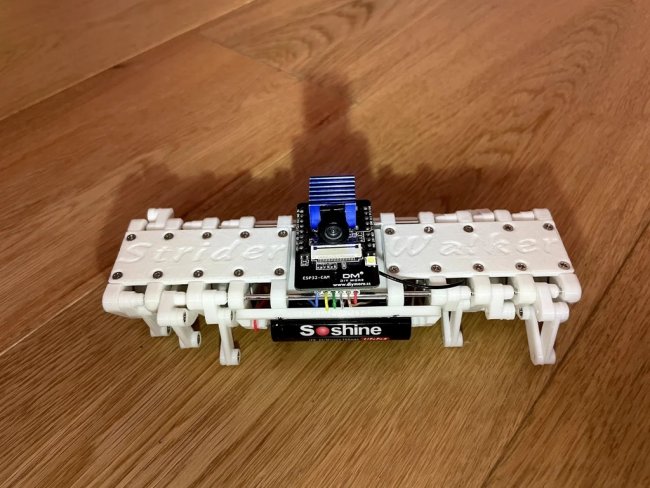
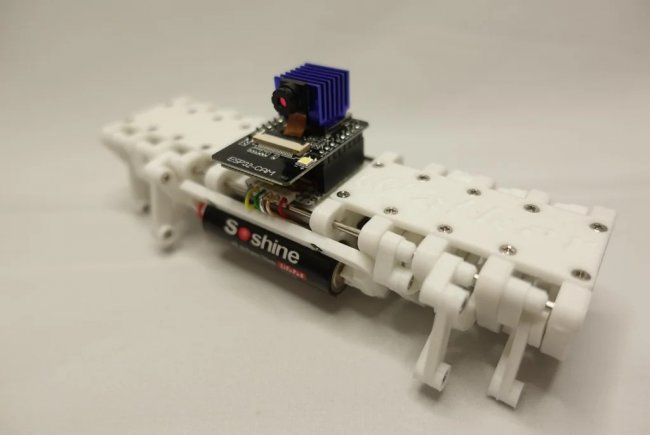
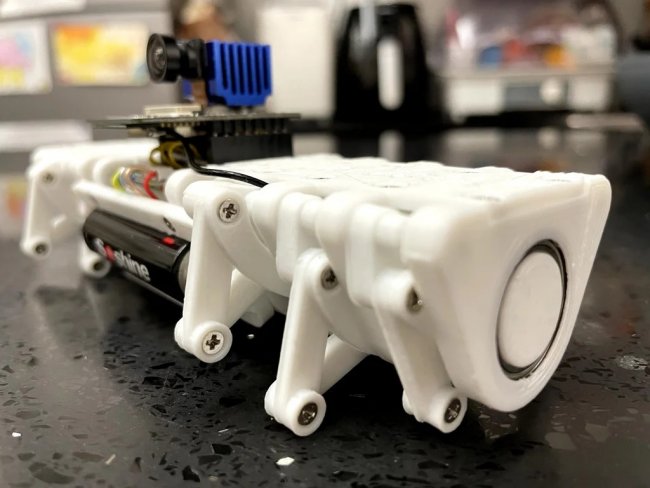
Strider — это механический робот, разработанные Уэйдом Вейглом. Strider эволюционировал из многих моделей дизайна, поэтому он очень хорошо ходит. Основные детали для него напечатаны на 3D-принтере,а работает устройство под управлением платы ESP32.
Давайте посмотрим два небольших видео с демонстрацией его работы.
Итак, для сборки данного робота понадобятся следующие
Инструменты и материалы:
-ESP32-CAM-MB (в комплекте с камерой):
-Аккумулятор с зарядным устройством LiFePO4 14500:
-Двигатель N20 3V 200RPM:
-DRV8833 2-канальная плата модуля драйвера двигателя постоянного тока:
-Разъем с 8 контактами — 2 шт:
-Подшипник 6702ZZ — 8 шт:
-Винт M2 с плоской головкой длиной 6 мм — 100 шт:
-Стержни диаметром 2 мм длиной 155 мм — 2 шт:
-Стержни диаметром 2 мм длиной 15 мм — 6 шт:
-3D-принтер:
-Гравер;
-Отвертка;
-Паяльные принадлежности;
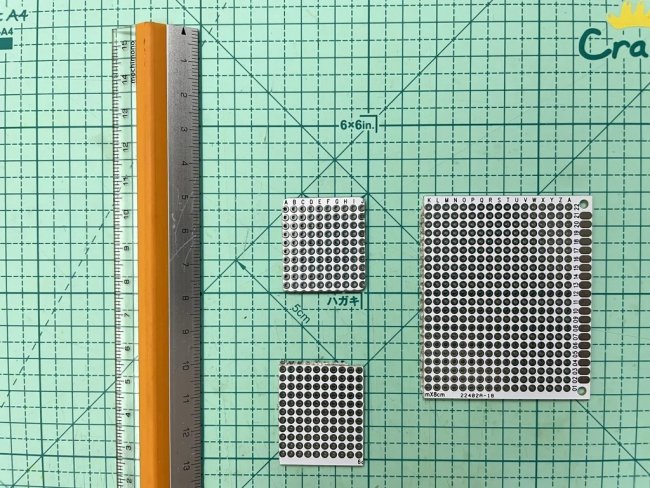
-Монтажная плата;
Шаг первый: Strandbeest или Strider
Есть несколько конструкций робота передвигающегося подобным образом. На фото ниже можно сравнить механику ходьбы данных моделей.
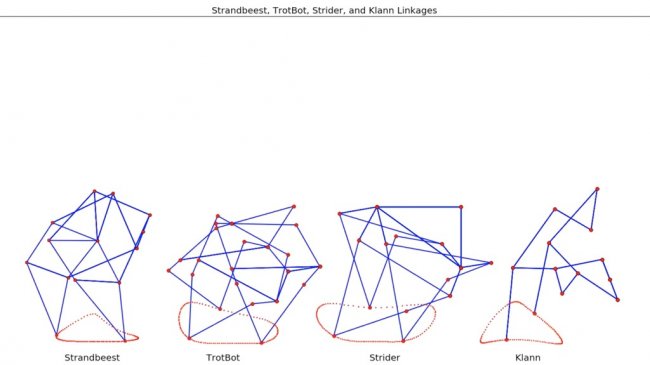
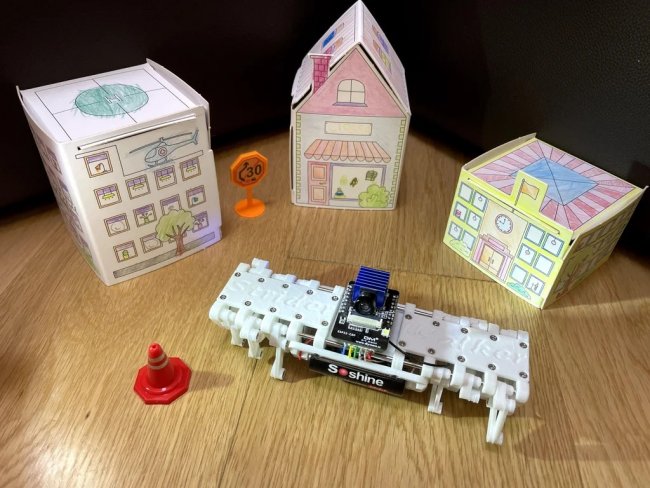
Если Strandbeest хорошо передвигается только на ровной твердой поверхности, то для Strider не проблема небольшие препятствия и мягкая поверхность.
Это хорошо видно на двух видео.
Шаг второй: аккумулятор
Эта конструкция имеет два слота для батареек 14500 (размер AA).
ESP32-CAM требует питания 3,3 В, встроенный стабилизатор напряжения (AMS1117) принимает максимум 15 В.
Двигатели N20 могут питаться от 3 — 12 В.
Для питания драйвера мотора DRV8833 нужно 2.7 — 10.8 В.
Проведя сравнительный анализ разных типов батарей 14500 мастер выяснил:
NiMH аккумулятор, 2 x 1,0 — 1,25 В = 2 — 2,5 В, недостаточно энергии
Литий-ионный аккумулятор, 2 x 2,5 — 4,35 В = 5 — 8,7 В, может соответствовать требованиям к питанию
Аккумулятор LiFePO4, 2 x 2,0–3,65 = 4,0–7,3 В, удовлетворяет требования к питанию и обеспечивает лучшую безопасность аккумулятора
Таким образом, можно использовать две батареи 14500 Li-Ion или LiFePO4. Батарея LiFePO4 предпочтительнее. Если вы выбираете литий-ионный аккумулятор, не забудьте выбрать аккумулятор со встроенной защитной платой или установить схему защиты.

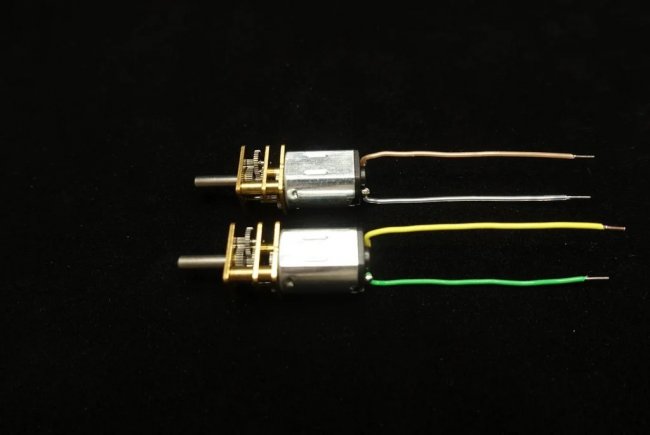
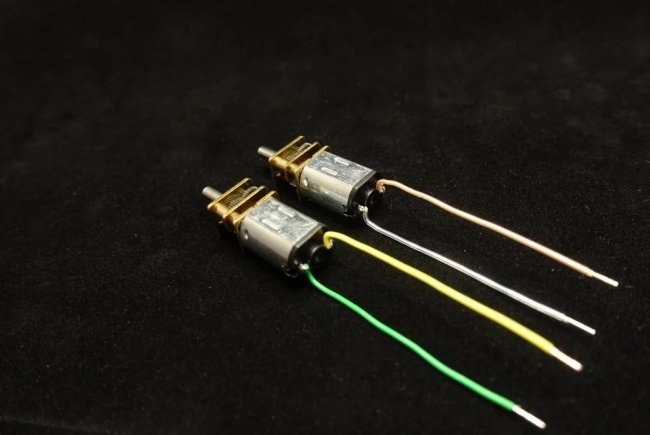
Шаг третий: двигатели
Этот Strider использует 2 маленьких мотор-редуктора N20. Такой мотор-редуктор имеет несколько доступных передаточных чисел. Мастер тестировал 3 передаточных числа от 3 В при 100 об / мин, от 200 до 500 об / мин и 3 В при 500 об / мин. Последний редуктор работает очень быстро, но для лучшего обзора камеры в реальном времени требуется устойчивость ходьбы, поэтому он рекомендует 3 В при 200 об / мин.


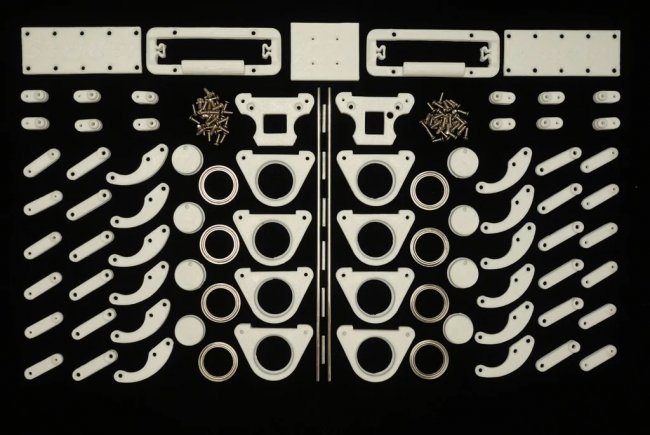
Шаг четвертый: остальные детали
Для сборки коленвала мастер использует 8 подшипников 6702ZZ, внутренний диаметр — 15 мм, внешний диаметр — 21 мм, ширина — 4 мм.

Для простоты во всех разработанных соединениях используются винты одного размера. Это винты с плоской головкой M2 длиной 6 мм, для сборки этого робота требуется 72 штуки.

Также в сборке используется стержень диаметром 2 мм. Приобретя стержень длинной 200 мм можно разрезать его на необходимую длину и количество.

Шаг пятый: 3D-печать
Файл для печати деталей можно скачать здесь. Конец имени файла «_x2» означает печать 2 копий … «_x12» означает печать 12 копий и т.д.
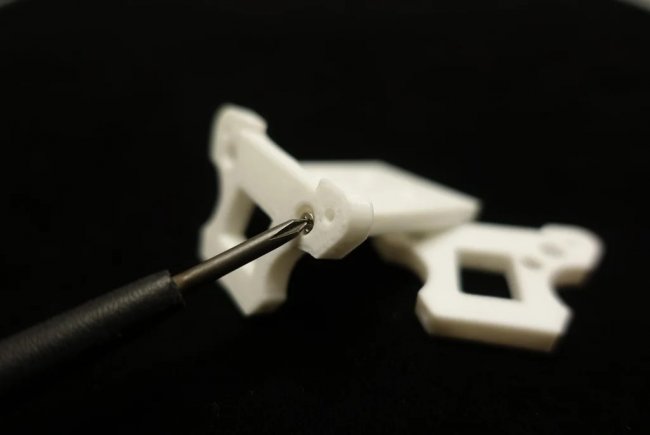
Детали, напечатанные на 3D-принтере, могут не печатать идеальные круглые отверстия. После печати мастер дорабатывает отверстия сверлом 2,1 мм.

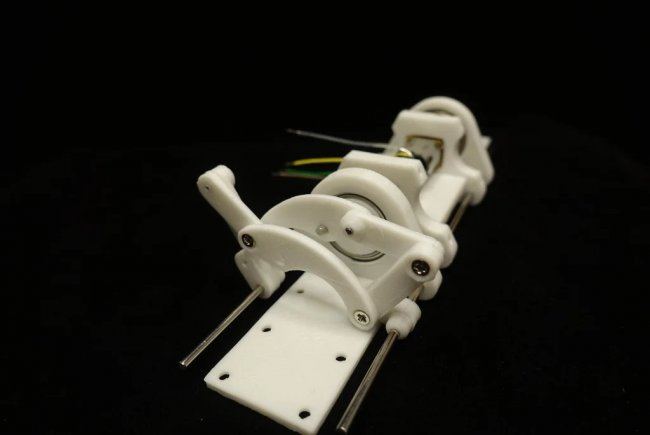
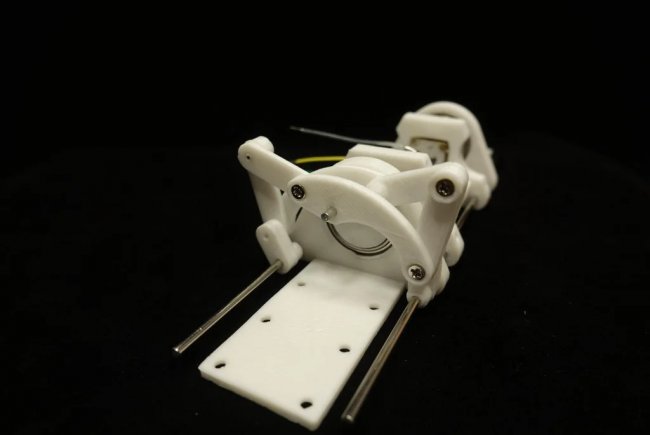
Шаг шестой: сборка
После печати деталей можно приступить к сборке робота.
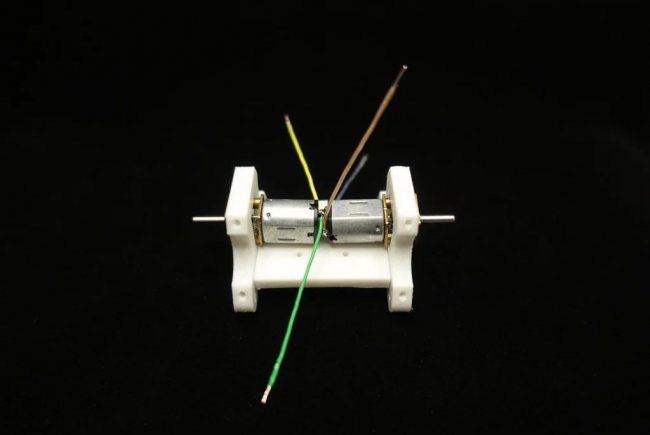
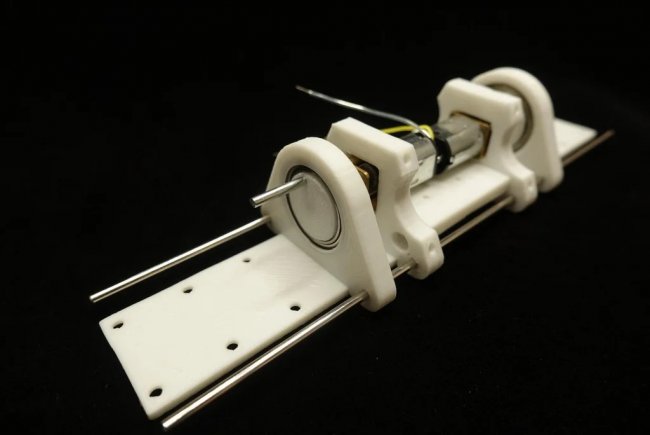
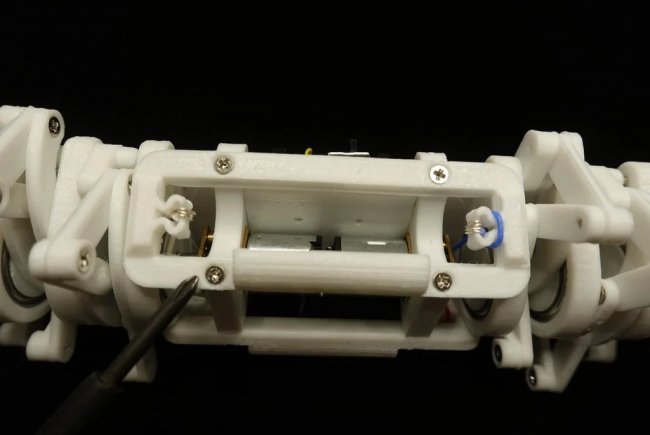
Используйте 4 винта, чтобы соединить вместе детали core1, core2a и core2b.


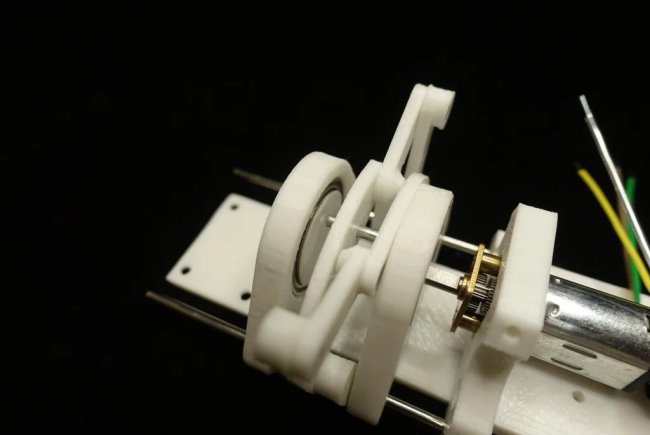
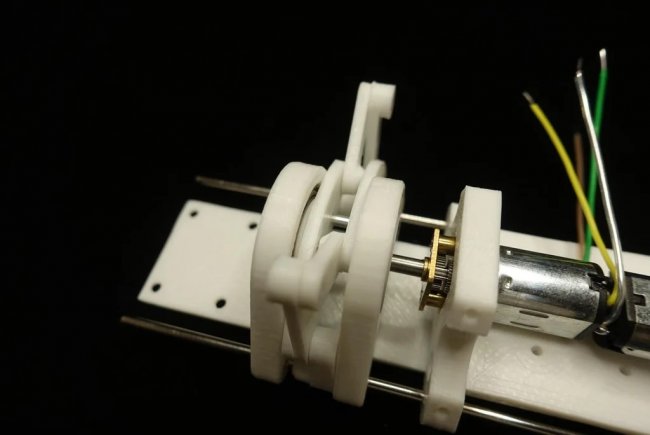
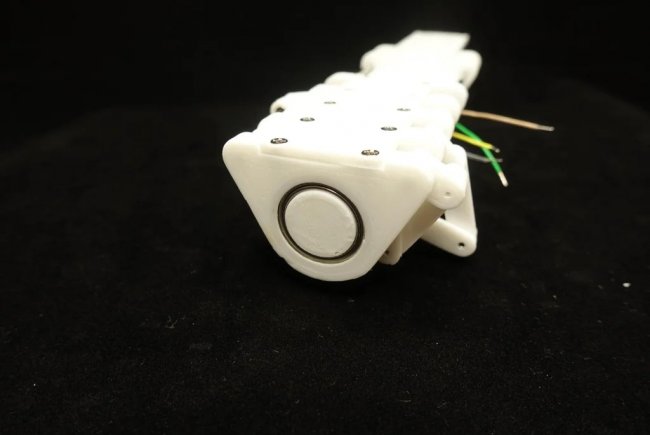
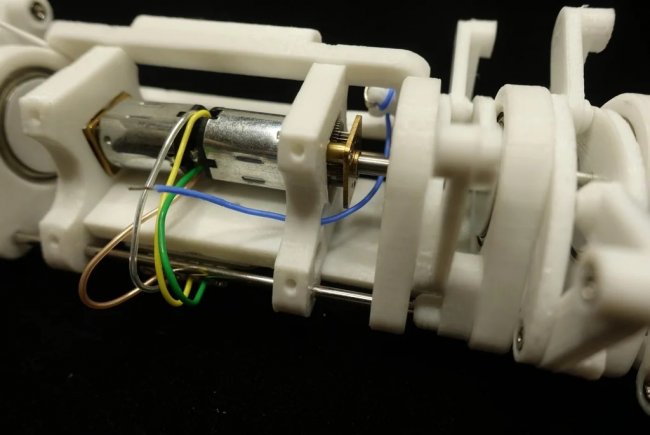
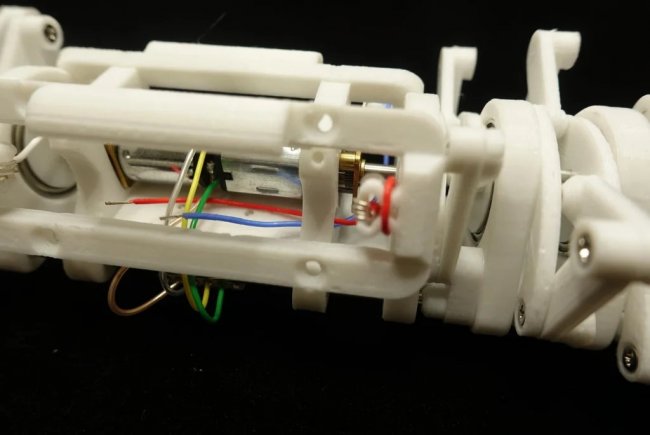
Установите двигатели. Обратите внимание на то, что 2 двигателя выровнены под углом 90 градусов.
Вставьте тонкостенный шарикоподшипник в корпус 2. Вставьте ось 3 в тонкостенный шарикоподшипник.
Повторите шаг для второго узла.




Установите ось 3 на вал двигателя.
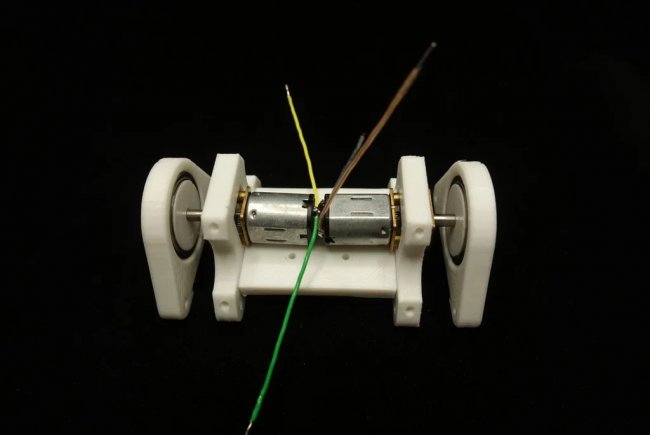
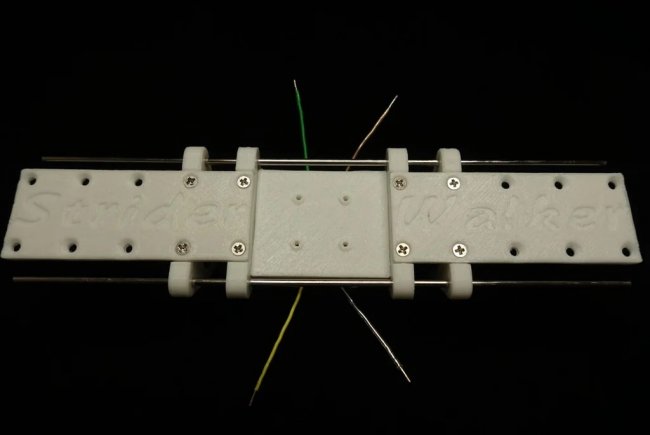
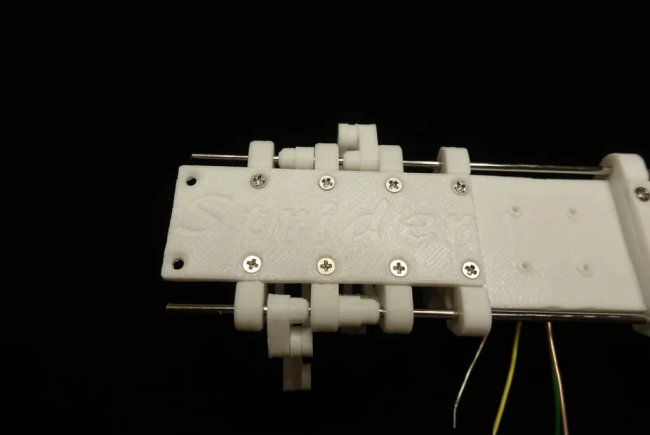
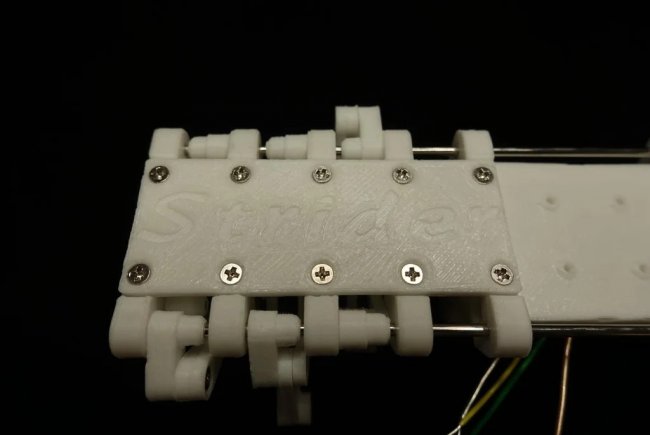
С помощью 8 винтов прикрепите крышку 1 и крышку 2 к корпусу. Проденьте пару стержней длиной 155 мм и диаметром 2 мм через отверстие в корпусе.
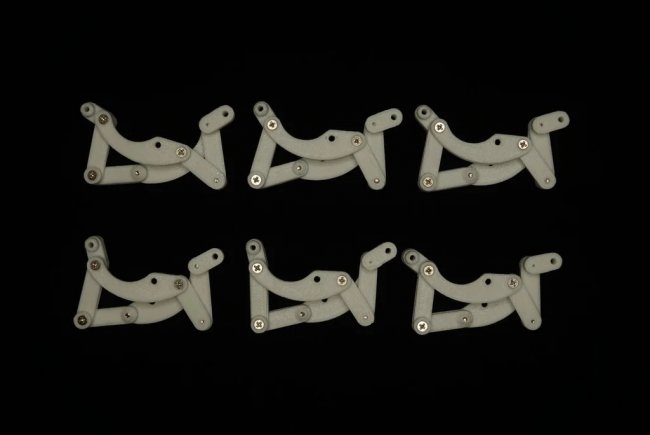
Используйте винт для соединения ножки 2, ножки 3 и ножки 1 вместе.
Используйте винт для соединения ножки 3 и ножки 4 вместе.
Повторите шаги, чтобы сделать вторую ногу.
Используйте 2 винта, чтобы соединить две ножки 2 и 4 вместе.
Соберите 6 пар ног.





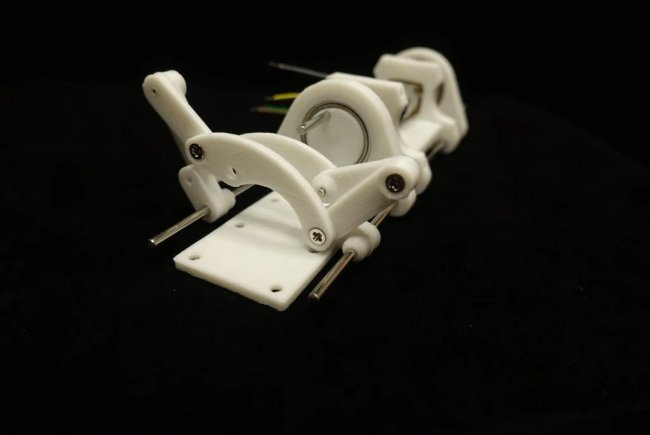
Установите стержень 15 мм в ось 3.Установите ноги на стержни.
Вставьте тонкостенный шарикоподшипник в корпус 2. Вставьте ось 2 в тонкостенный шарикоподшипник.
Сделайте четыре таких узла.




Установите узел на ось и зафиксируйте винтом.

Повторите установку ног. С каждой стороны по 3 пары ножек, каждая пара ножек смещает коленчатый вал на 60 градусов.
Вставьте тонкостенный шарикоподшипник в корпус 1.
Вставьте ось 1 в тонкостенный шарикоподшипник. Повторите шаги для второй детали.




Совместите отверстие оси 1 и проденьте через стержень 15 мм. Закрепите конец корпуса винтами.
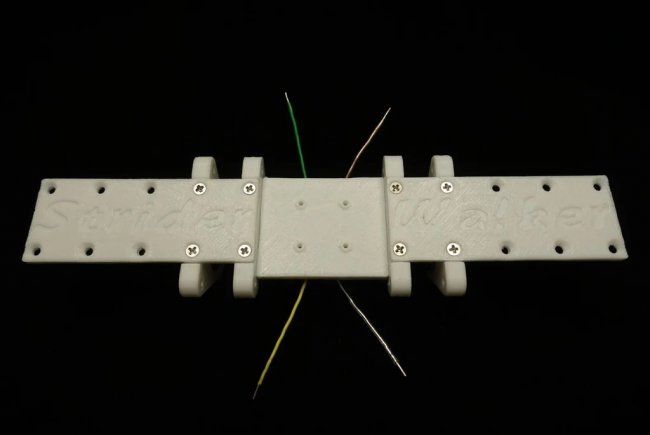
Установите на держатель провода, подключение последовательное. Рекомендуется использовать красный и синий провод для обозначения положительного и отрицательного полюса аккумулятора.

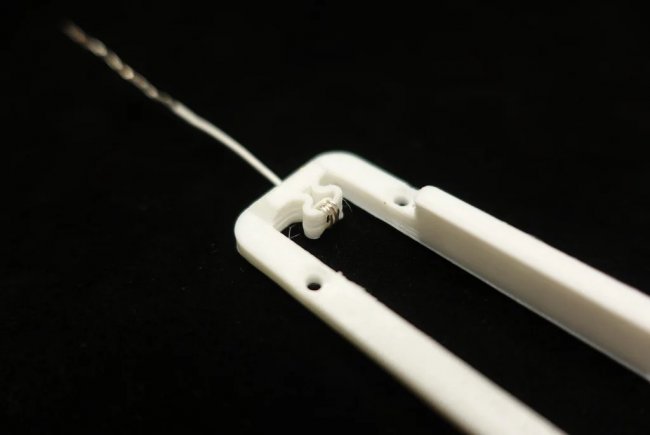
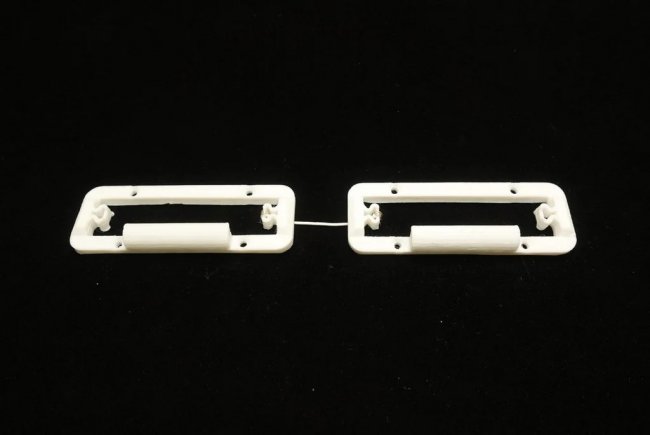
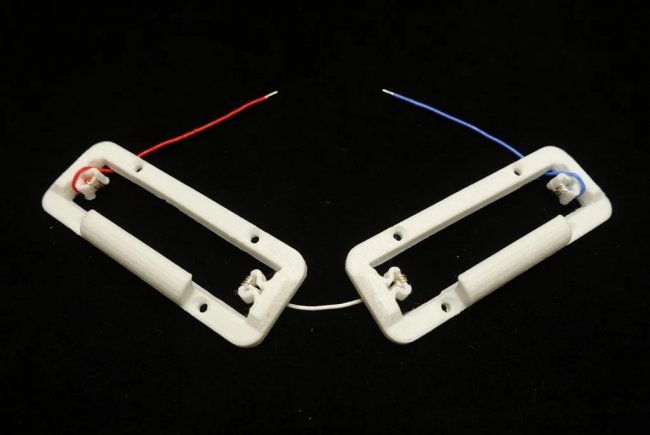
Протяните провода и закрепите держатели.
Шаг седьмой: программное обеспечение
IDE Arduino
Загрузите и установите Arduino IDE.
Следуйте инструкциям по установке, чтобы добавить поддержку ESP32.
Следуйте инструкциям по установке, чтобы установить загрузчик файловой системы Arduino ESP32.
Загрузите FSBrowserPlus.
Импортируйте библиотеки в Arduino IDE. (Меню «Скетч» в Arduino IDE -> «Включить библиотеку» -> «Добавить библиотеку .ZIP» -> выбрать загруженный ZIP-файл)
Загрузите последние библиотеки ESPAsyncWebServer.
Импортируйте библиотеки в Arduino IDE. (Меню «Скетч» в Arduino IDE -> «Включить библиотеку» -> «Добавить библиотеку .ZIP» -> выбрать загруженный ZIP-файл)
Шаг восьмой: конфигурация
Тип камеры
В «FSBrowserPlus.ino» раскомментируйте свою модель камеры примерно в строке 28 и закомментируйте все остальные. Например, CAMERA_MODEL_ESP32_CAM_ROBOT для этого робота-камеры Strider.

Показать / Скрыть текст// Select camera model
// #define CAMERA_MODEL_WROVER_KIT // Has PSRAM
// #define CAMERA_MODEL_ESP_EYE // Has PSRAM
// #define CAMERA_MODEL_M5STACK_PSRAM // Has PSRAM
// #define CAMERA_MODEL_M5STACK_V2_PSRAM // M5Camera version B Has PSRAM
// #define CAMERA_MODEL_M5STACK_WIDE // Has PSRAM
// #define CAMERA_MODEL_ESP32_CAM // Has PSRAM
#define CAMERA_MODEL_ESP32_CAM_ROBOT // Has PSRAM
// #define CAMERA_MODEL_M5STACK_ESP32CAM // No PSRAM
// #define CAMERA_MODEL_TTGO_T_JOURNAL // No PSRAM
// #define CAMERA_MODEL_JSZWY_CYIS
#include "cameraAPI.h"
Моторные штифты
CAMERA_MODEL_ESP32_CAM_ROBOT также определяет выводы двигателя в «camera_pins.h»:

Показать / Скрыть текст#define MOTOR
#define MotorL_A_Pin 13
#define MotorL_B_Pin 12
#define MotorR_A_Pin 2
#define MotorR_B_Pin 14
Светодиодный штифт
Светодиод напрямую управляется веб-интерфейсом GPIO API. В данном случае это GPIO 4. Можно изменить вывод светодиода примерно в строке 616 файла «camerarobot.htm».
const query = `${baseHost}/gpio?pin=4&val=${value}`;
Шаг девятый: загрузка кода
Подключите ESP32-CAM к компьютеру. Откройте Arduino IDE Откройте FSBrowserPlus.ino
Измените ssid и пароль на свои собственные учетные данные точки доступа WiFi
Выберите Board и «ESP32 Dev Module» в меню «Tools».
В меню «Tools» выберите «Default 4MB with fat (1.2MB APP/1.5MB FATFS)».
Нажмите кнопку «Загрузить» в Arduino IDE.
Выберите «ESP32 Sketch Data Upload» в меню «Tools» .
Выберите тип FS для «FatFS» и нажмите кнопку «ОК».

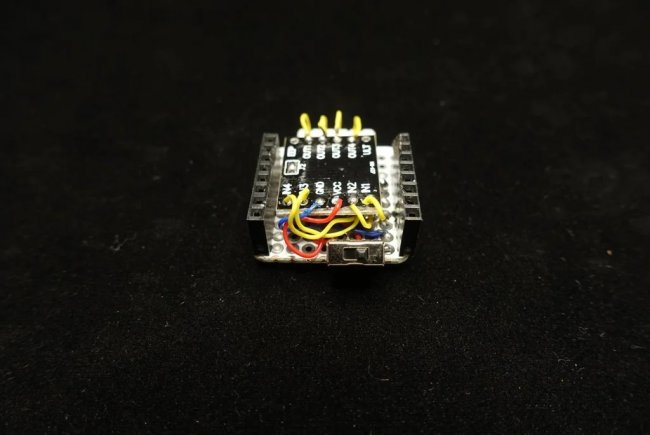
Шаг девятый: плата
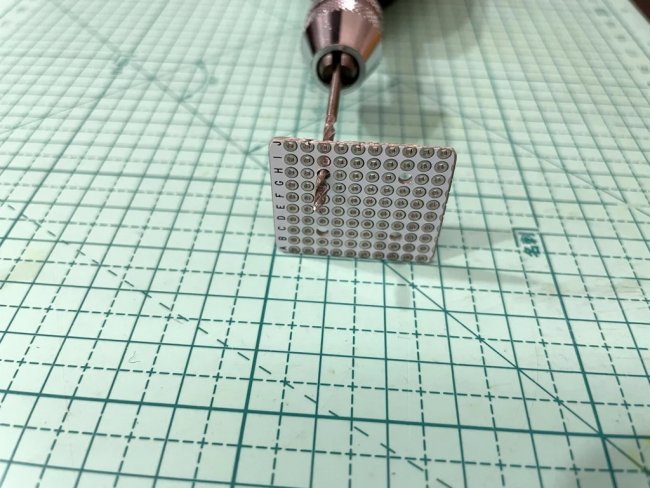
Отрежьте печатную плату 10 x 10 отверстий. Просверлите 4 отверстия в C3, H3, C8 и H8.
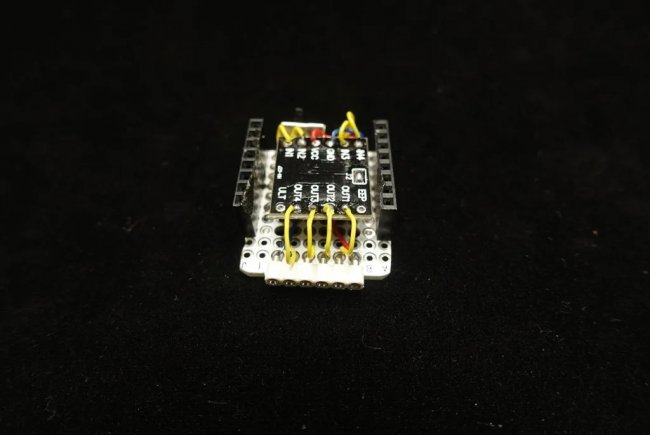
Производит монтаж по следующей схеме (при монтаже лучше использовать длинные провода):
Battery -> Switch -> ESP32-CAM -> DRV8833 -> Motor
+ve pole -> Pin 1
Pin 2 -> 5V -> Vcc
-ve pole -> GND -> GND
GPIO 12 -> IN1
GPIO 13 -> IN2
GPIO 14 -> IN3
GPIO 2 -> IN4
OUT1 -> LEFT +ve
OUT2 -> LEFT -ve
OUT3 -> RIGHT -ve
OUT4 -> RIGHT +ve
short J2
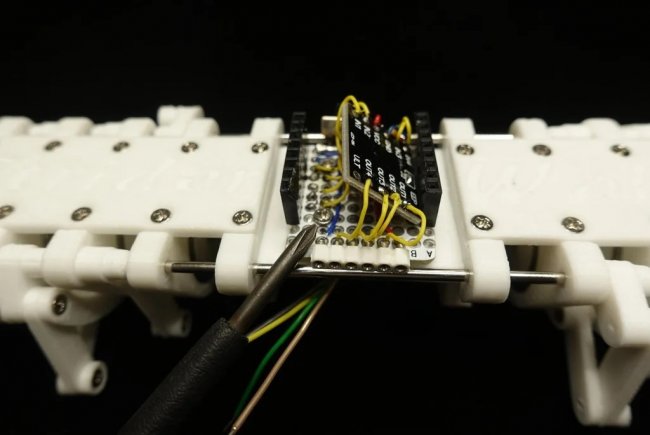
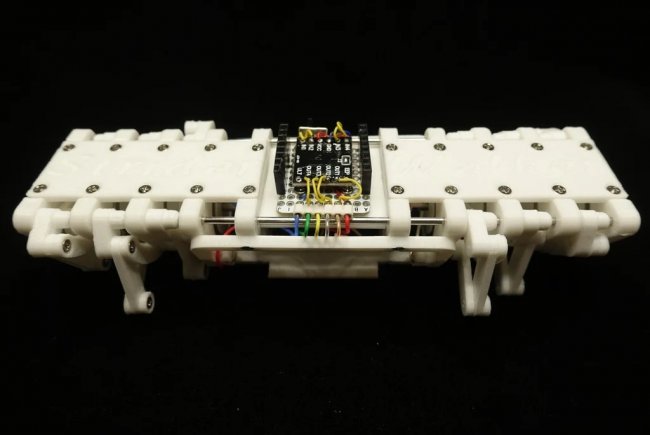
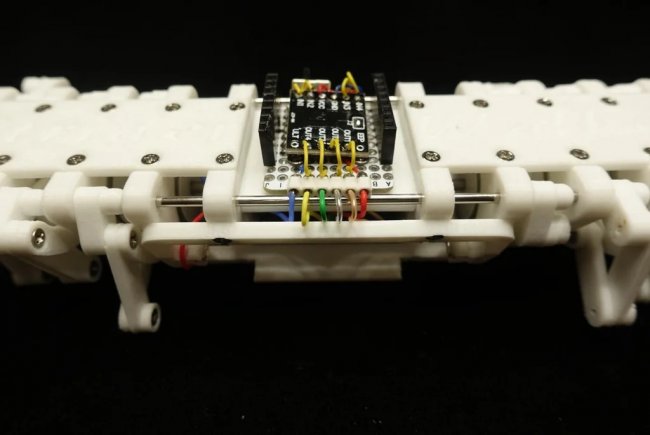
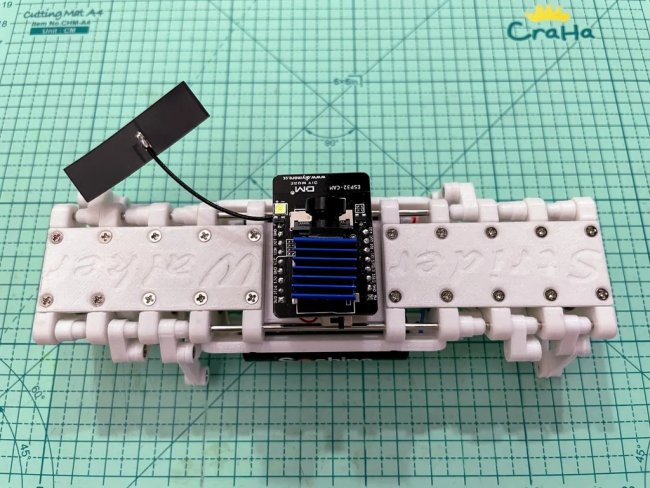
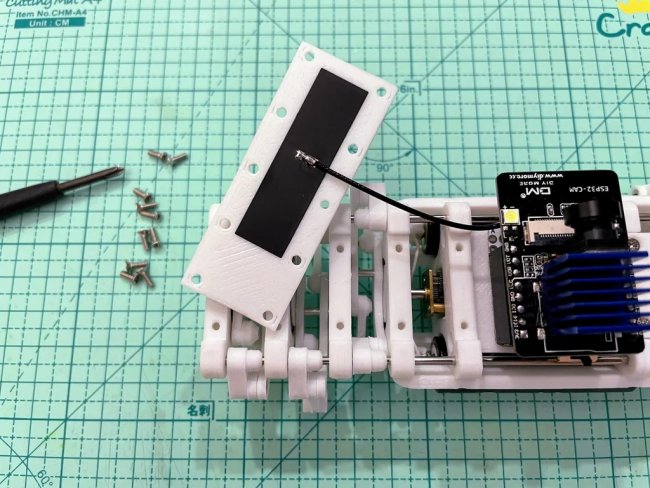
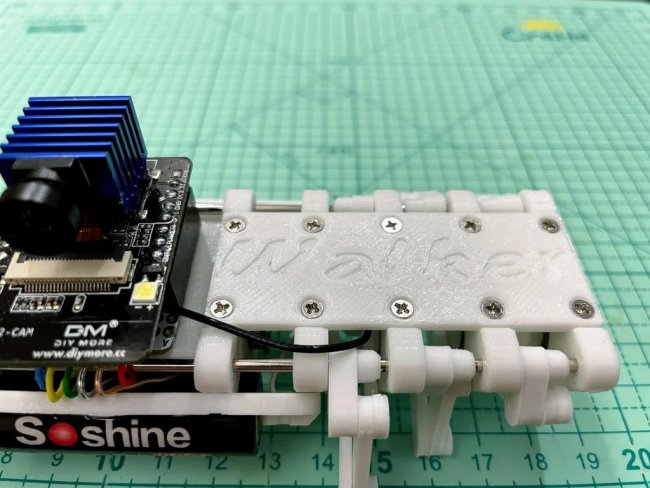
Дальше нужно прикрутить плату к роботу.
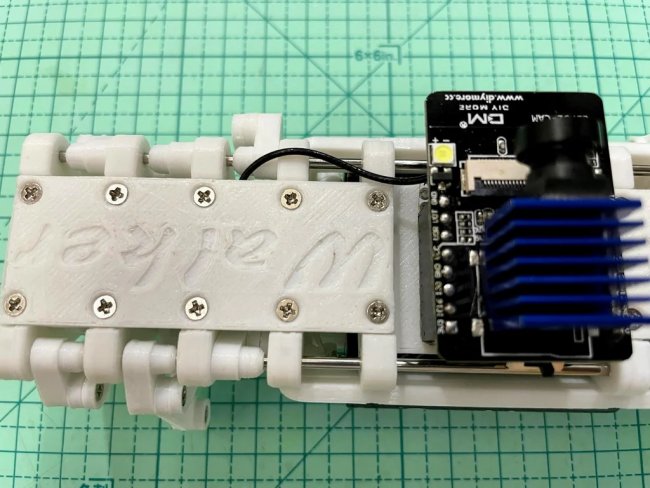
Подключите камеру. Наклейте радиатор на кардридер SD. Наклейте модуль камеры на радиатор.
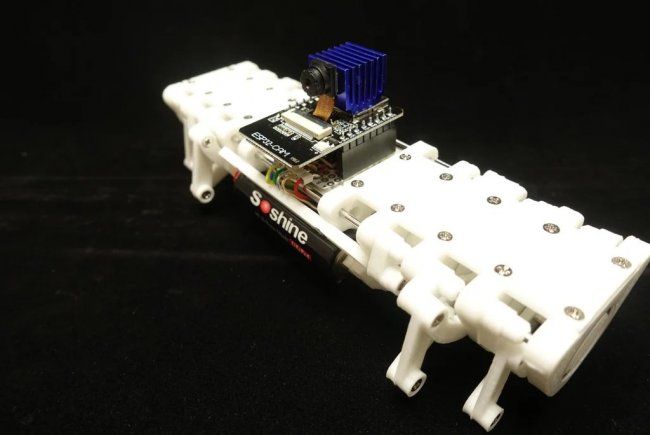
Установите батарею.

Шаг десятый: работа устройства
FSBrowserPlus работает в двойном режиме AP + STA.
Если вы ввели свою точку доступа WiFi и пароль, вы можете напрямую перейти по адресу http: //fsbrowserplus.local, чтобы получить доступ к FSBrowserPlus, но он ограничен зоной покрытия точки доступа WiFi.
Если робот за пределы зоны покрытия точки доступа Wi-Fi, просто выполните поиск точки доступа Wi-Fi под названием «fsbrowserplus» и введите предварительно определенный пароль в код для подключения. После подключения откроется веб-страница Captive Portal. Затем выберите ярлык Camera Robot.
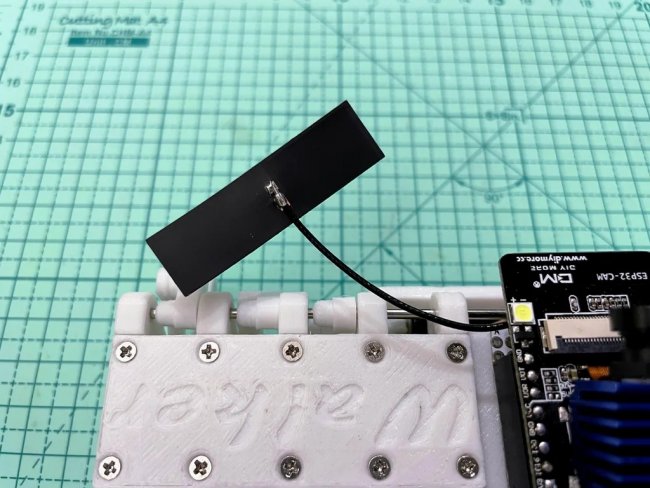
Некоторые производители реализуют ESP32-CAM с различными вариантами антенн. Внешняя антенна может улучшить производительность потоковой передачи видео с камеры.
Все готово. Теперь у вас есть управляемый робот с камерой.

Источник (Source)
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
Источник: https://usamodelkina.ru/



Average Rating